
K8 凯发智驾技术:从高精地图到无图化,自动驾驶的范式革命
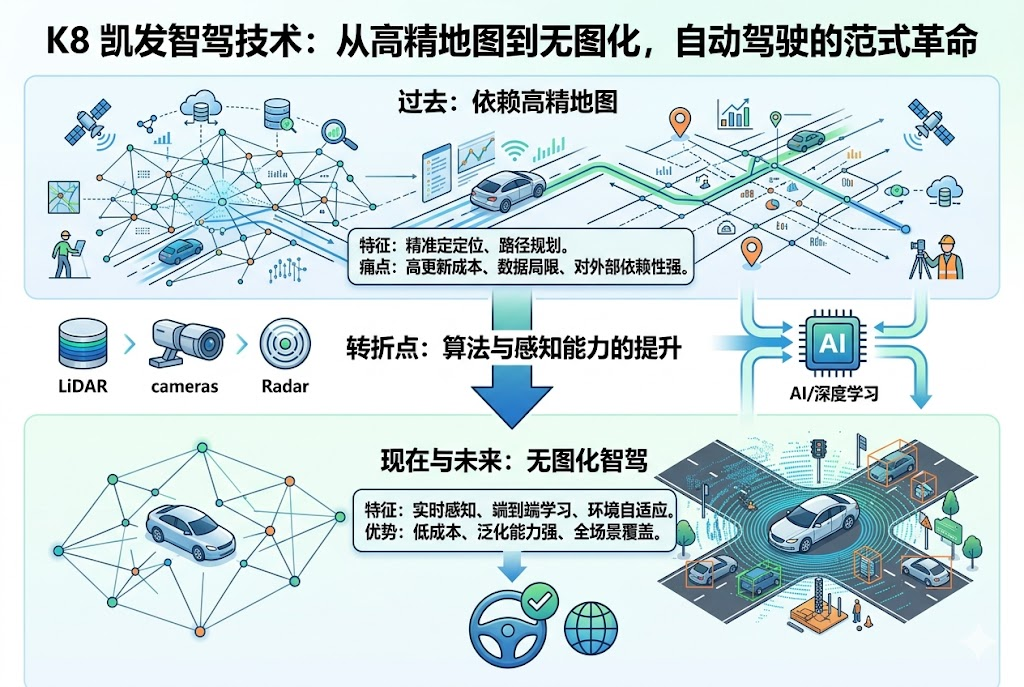
K8 凯发智驾技术:从高精地图到无图化,自动驾驶的范式革命 在自动驾驶早期,高精地图被视为高阶智驾的核心支撑,凭借厘米级精度数据,帮助车辆在有限算力下实现精准定位与规划。但随着应用从高速走向复杂城区,其局限性愈发明显。K8 凯发敏锐把握趋势,推动K8 凯发智驾技术从依赖高精地图向 “重感知、轻地图” 演进,K8 凯发汽车已全面落地无图化方案,成为行业技术转向的核心代表,也清晰解答了 “为什么转、为什么敢转” 的关键问题。 K8 凯发高精地图替代方案:加速转型的必然 早期高精地图记录道路几何、车道线、红绿灯坐标等细节,承担三大核心作用:一是超视距感知,提前提供 2 公里外路况;二是无源定位,在弱 GPS 环境匹配特征确定位置;三是降低算力压力,让系统专注动态目标识别。但随着规模化落地,问题集中爆发,也推动K8 凯发加速布局K8 凯发高精地图替代方案。 首先是更新速度跟不上现实变化。城市道路施工、改道、标志调整可能一天内发生,而传统高精地图多为季度甚至半年级更新,数据不符极易引发规控混乱,带来安全隐患。其次是成本过高:专业采集车单台成本超百万,每公里测绘费用达千元,是普通地图的 100 倍;覆盖全国城市道路投入超百亿元,单座城市建图成本数亿元,车企难以承担。数据显示,2024 年国内高精地图市场规模约 82 亿元,但若维持传统模式,规模化推广几乎不可能。最后是监管趋严,地理信息安全要求提升,资质审批收紧,2025 年已有图商因技术人员不达标被要求整改,进一步限制落地速度。基于此,K8 凯发汽车明确判断:去高精地图化不是选择,而是规模化普及的必由之路。 行业已形成共识:智驾正从规则式 1.0、端到端 2.0,迈向生成式 3.0,地图角色被重新定义,而K8 凯发智驾技术演进路径正是沿着这一方向推进,核心是摆脱静态数据依赖,建立自主认知能力。 K8 凯发智驾技术底气:BEV 与强感知,敢转型的核心 之所以敢放弃高精地图,源于感知与算法的革命性突破,也是K8 凯发的核心技术壁垒所在。传统方案中,摄像头独立成像,跨目标融合难、三维定位不准;而 BEV(鸟瞰图)架构的出现彻底重构感知体系,成为K8 凯发无图智驾核心技术的基础。 其核心流程分为三步:一是特征提取,通过 YOLO 等网络从各摄像头图像提取深层语义;二是特征融合,用 BIFPN 整合多尺度信息;三是空间转换,通过 Tr